What is Anchor pruning in the context of object detection?
Anchor pruning is a pruning technique for object detection, which removes redundant anchors in the detection head.
How does Anchor Pruning work?
Anchor Pruning starts from a fully trained model.
Using a search algorithm, the search space of possible anchor configurations is explored efficiently.
The result of the search algorithm is a set of anchor configurations that are Pareto-efficient.
After selecting a Pareto-optimal anchor configuration, the accuracy can be improved by training this configuration again from scratch.
Why does Anchor pruning have larger impact on the running time of object detection models than just the FLOPS reduction?
The running time of an object detection model in an embedded context is often dominated by the running time of the post processing steps, which is directly related to the number of bounding boxes that are produced by the network. This post-processing step is however not included in the FLOPS count.
What is an Overanchorized network?
It is as an object detection model that has more anchors than strictly needed.
An Overanchorized network can be used as base model to start anchor pruning from, this avoids having to experiment with many different anchor shape initializations.
When is an object detection anchor redundant?
An anchor is redundant when it produces bounding boxes that are (almost) completely covered by predictions of neighboring anchors.
The distribution of bounding boxes produced by different anchors shows that for certain anchors, many of the predictions can also be produced by neighboring anchors.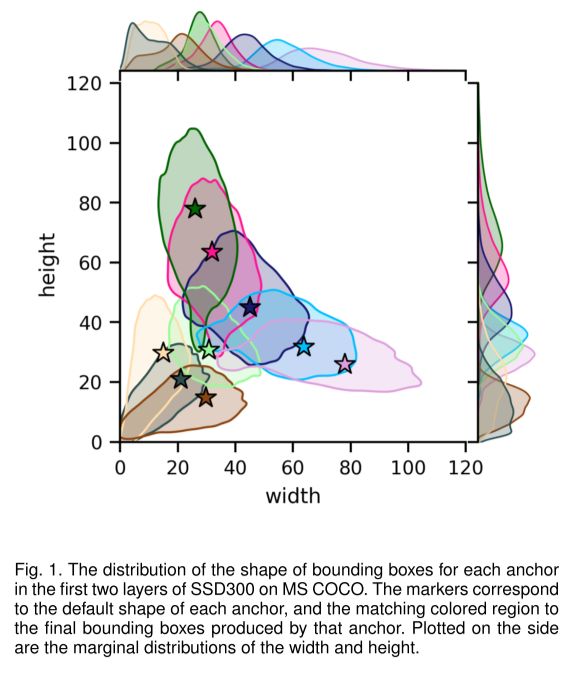
What is an anchor-based object detector?
Anchor-based detectors associate some predefined anchors to each feature layer to which the detection head is attached. Usually, the anchors are defined in terms of size and aspect ratio. The classifier and regressor in the detection head output the class scores and the 4 offsets relative to the predefined anchor shape for each pixel in a feature map.

Anchor boxes are associated with each pixel in every feature map.
The final bounding box predictions are made as classification predictions + offset predictions from the anchor.
Which technique can reduce the FLOPS of the object detection head by 50% without loss in accuracy?
Anchor Pruning